由于自身的非线性失真,超低频扬声器的性能表现很难被预估,尤其是处在大功率情况下。CODA传感器控制超低频扬声器被设计出来并克服这一问题。
CODA传感器控制超低频扬声器中的换能器(图7)包含了一个集成速率感应器(integrated velocity sensor)用于测量低频(LF)振膜的实时运动,并将它与输入音频信号进行比对。这一独有的传感器控制技术是一个自动优化的封闭反馈回路,它能精准地计算并确定驱动单元回放输入音频信号所需要的功率大小。任何由驱动单元或是整个箱体产生的失真会被立即纠正。
其结果是音频系统的设计师可以轻松驾驭CODA高保真大功率超低频扬声器,处理输入音频信号中低频信号的增强扩大,与其它频段一样,表现出声音中的细节,复杂性与自信。

图7. CODA传感器控制低频组件
历史
尽管现代专业音频领域(ProAudio)的超低频扬声器几乎都是采用倒相孔(port)或者号角加载(horn loaded)技术,扬声器里的反馈控制它也不是新的技术。最早的专利由Smythe在1933年就开始应用,到了1970年代早期,飞利浦公司(Philips)开发出了一款叫做Motional Feedback (MFB)的扬声器系统,它是一个将低频单元基于一个压电(piezo)加速传感器的反馈系统。由于各种原因,这一技术在HiFi市场并没有取得成功,但今天仍有一些High-end HiFi公司在它们的产品中使用MFB技术(如Linn,SilberSand等)。由于技术的限制特别是在大功率情况下,MFB技术并不适合也从未在专业音频(ProAudio)领域应用。
MFB技术与CODA Audio传感器控制技术之间主要的区别在于MFB使用一个压电传感器测量加速,而CODA Audio使用一个专利的电子动态(electro-dynamical)传感器测量音圈的速率并提供以下的优势:
压电加速计(accelerometer)的测量精度不高,尤其是在长冲程产生高失真的情况下。
扬声器产生的可变磁交流场(magnetic AC-fields),取决于音圈的位置,大功率长冲程的专业音频驱动单元尤其强烈。外部的噪声源还会打扰到压电传感器的功能。CODA Audio的电子动态(electro-dynamical)传感器测量音圈的速率,在60 mm行程下只有0.1 %的公差。它屏蔽了外部的噪声源并确保超高水平的精度。
这一目标是使用负反馈回路来控制并稳定扬声器。如果测量传感器的精度不高或者是被打扰,正反馈会发生从而增大失真。尤其是在大功率水平时,当测量源的精度不高,如采用压电加速计,这一情况会发生。
处理
传统的扬声器需要外部的处理来优化它们的频率响应。任何采用倒相孔或者号角加载技术的超低频扬声器,它们最小程度处理的方法是:
高通滤波(HPF),低通滤波(LPF)以及一个或者多个参量均衡器。
当低通滤波被应用于超低频,高通滤波被应用于过冲程的驱动单元保护,那么就需要EQ来补偿超低频段的低效率。
处理就增加了群延迟(group delay)同时改变了整个系统的脉冲响应。
CODA Audio传感器控制超低频扬声器无需任何外部的处理(除了低通滤波以外)。它是一个封闭的回路,自我优化的系统,驱动单元会确认精准的功率需求以重放原始的音频输入信号。
测量
SC8传感器控制超低频在距离箱体5cm的位置进行测量以避免空间反射。仅有前置的2 x 18”驱动单元被激活,后后置的2 x 18"驱动单元被关闭以使空间影响最小化。除了低通滤波90Hz 24dB Link/Riley之外没有外部的处理。
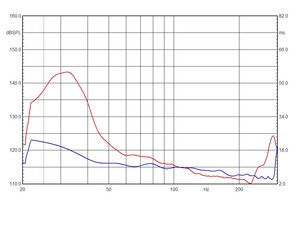
传统的倒相孔超低频扬声器,高性能大型专业音频2 x 18"驱动单元,调至32Hz,在距离倒相孔5cm位置测量以避免空间反射。这一系统已经接近传统倒相孔超低频扬声器的性能极限。典型的处理包括:HPF30Hz/24dB-But, LPF90Hz/24dB-Link/Riley PEQ35Hz+8dB。频率响应曲线表明它的最低频率范围是由倒相孔来执行的。
频率响应 Frequency response
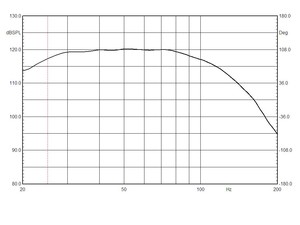
(图8.1)SC8传感器控制超低频包含LPF 90HZ 24dBLink/Riley,频率响应测量,距离扬声器5 cm位置
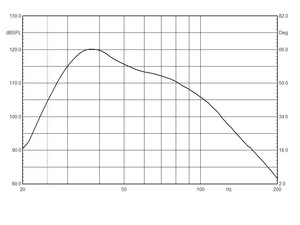
(图8.2)传统的倒相孔超低频扬声器包含处理,频率响应测量,距离扬声器倒相孔5 cm位置
脉冲响应 Impulse response
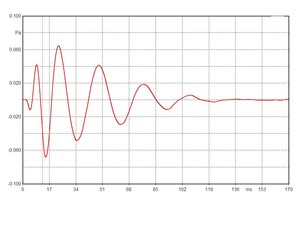
(图9.1)SC8传感器控制超低频包含LPF 90HZ 24dBLink/Riley,响应响应测量,距离扬声器5 cm位置

(图9.2)传统的倒相孔超低频扬声器包含处理,脉冲响应测量,距离扬声器倒相孔5 cm位置
群延迟 Group delay
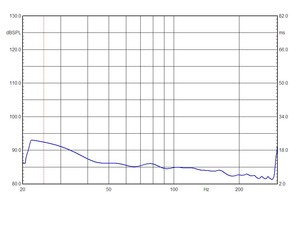
(图10.1)SC8传感器控制超低频包含LPF 90HZ 24dBLink/Riley,群延迟测量,距离扬声器5 cm位置
(图10.2)传统的倒相孔超低频扬声器包含处理,群延迟测量,距离扬声器倒相孔5 cm位置
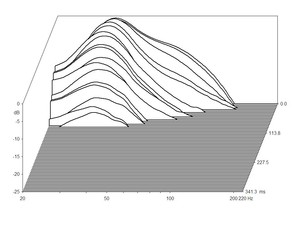
瀑布图 Waterfall
(图11.1)SC8传感器控制超低频包含LPF 90HZ 24dBLink/Riley,瀑布图测量,距离扬声器5 cm位置

注释:因为扩声场地环境的反射原因,扬声器的低频响应很难被测量(哪怕是在消声室(anechoic chamber)中)。SC8瀑布图测量表明在20 Hz — 40 Hz频率范围之间少量的来自空间的反射。
(图11.2)传统的倒相孔超低频扬声器包含处理,瀑布图测量,距离扬声器倒相孔5 cm位置
测量解释
从测量结果可以看出,反馈回路控制超低频扬声器相比较传统的功放/超低频扬声器解决方案,有一些明显的优势。
频率响应
传感器控制技术没有中断(cut off)的频率。比较器的设置用于优化系统的响应低至25Hz (-3dB) / 20Hz (-6dB) (图8.1)如果有需要,甚至可以轻松地将平坦响应调低至10Hz。
传统的倒相孔超低频扬声器,高性能大型专业音频2 x 18”驱动单元,调至32Hz,在距离倒相孔5cm位置测量以避免空间反射。典型的处理包括:HPF30Hz/24dB-But, LPF90Hz/24dB-Link/Riley PEQ35Hz+8dB。频率响应曲线表明它的最低频率范围是由倒相孔来执行的(图8.2)。这个频率范围总体上受限于倒相孔的调频(tuning frequency)在这样的系统中,频率是中断(cut off)的。与号角加载技术类似,倒相孔加载超低频扬声器如果需要扩展更低的频率响应,它的箱体将变得极其巨大。在36Hz两个系统都有相同的输出,而SC8在25Hz多出了12dB,在20Hz多出了23dB,相比较传统系统。
脉冲响应
脉冲响应描述作为时间的一个函数,系统的反应。传感器控制系统(图9.1)提供了一个完美的脉冲响应,而传统的系统则表明群延迟增加,由于倒相孔(共振的结果)与音频处理的原因而产生的延迟改变了脉冲响应(图9.2)。这一脉冲响应表现在倒相孔或者号角加载技术的超低频扬声器中非常普遍。SC8超低频提供可控的脉冲响应确保了清晰的声音回放。
群延迟
传感器控制系统(图10.1)在42Hz- 100Hz频率范围之间几乎是0延迟。42Hz以下群延迟略有增加一直到8ms@34Hz直至25Hz达到最大值11ms。
事实上传感器控制系统产生的整个频谱(spectrum)在声学上时间是相同的,因为这样的群延迟已经在我们预测能力的极限之下。
传统超低频(图. 10.2 — 红线)在34Hz增加的群延迟为44ms。如果一个快速瞬变序列(fast sequence of transients)上升,它的结果将变得模糊,声音也变得不精确。而传感器控制超低频,瞬变的产生与输入音频信号有着相同的时间联络(time liaison)。这意味着一个快速瞬变序列(fast sequence of transients)的结果可以被清晰地听到。
瀑布图
尽管SC8的瀑布图测量 (图11.1)表明在20 Hz – 40 Hz频率范围之间有少量的来自空间的反射,但它仍重复了我们在脉冲响应中已经看到的 — 非常快速而清晰的响应确保了同质性(homogeneity)以及声音回放的精准度。
传统倒相孔加载的超低频(图11.2)则表现出典型的围绕箱体调频(tuning frequency)的长共振,以及围绕已有共振的噪声/干涉(noise/interference)突出趋势。
结论
传统超低频扬声器的设计经过了多年的实践,已经做到了足够好,而传感器控制超低频技术则迈出了至关重要的一步,目的是一个真正完整的相干(coherent)扬声器系统设置,带来平坦频率与相位响应的扩展低频范围,为完美的音乐回放提供出众的精准度与清晰度。